CATEGORY開発中
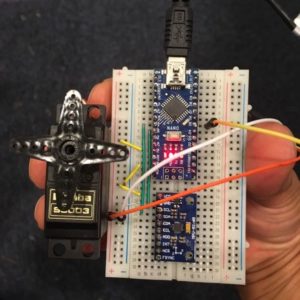
リアルタイムクロックをいじってみた
リアルタイムクロックというものを初めていじくった。検討打診された機器のカウントダウンタイマー用に使おうと思って。途中はどうあれ、最低限の仕事をしてくれそうな感触。ちょっとずつできることが増えている。かな? できたら喜んでくれるかな〜。 …
基板を船体に載せてみた
これで船体が傾いてもマストは立ってられる?手のプルプルが拾われてマストまでプルプルしてる。揺れ周期速度には割りと対応するみたい。動きのスムーズさは改善したい。 [video src="http://okya.info/wp-content…
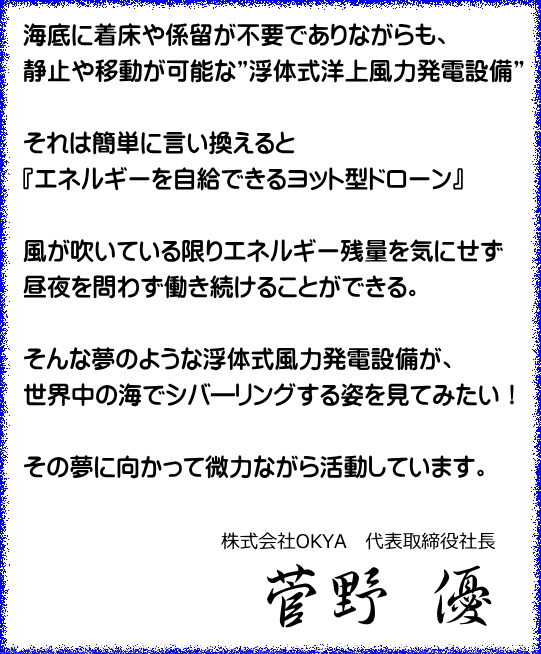
タッパーウェアにパッキング
独立の機能だし、ひとつのボードに詰め込まなくてもいい気がしたので分けて搭載してみる。左がリモコン指示を受信してマスト軸周りの回転、ラダーを動かすサーボ2個の操作。右は、揺れる船の傾きを加速度センサで取得し船に対するマストの傾きを変えるサーボ…
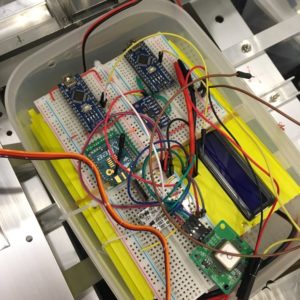
マスト角度制御用のサーボ位置変更
マストの傾きを制御するサーボの取り付け位置を変えてみたら、少しは良くなったかしら。倒す角度の計算式を見直して、回路も組み直しましょう。 https://youtu.be/nPUdBKhJQxk…
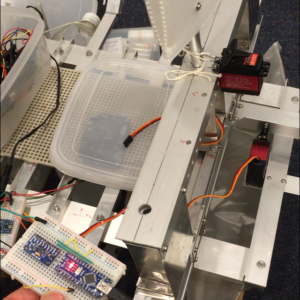
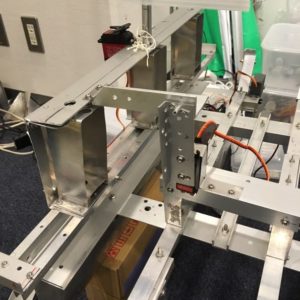
とりあえず、でマストを動かしてみた
加速度センサーの傾きに合わせてマストを傾けられるようにしてみた。まず、フレームの剛性や取り付け強度の問題で使い物にならない...。 トルクの過不足は後回し。 がっちり作ると重くなるし、バランス悪くなりそう。付け方からして考え直そう。 …
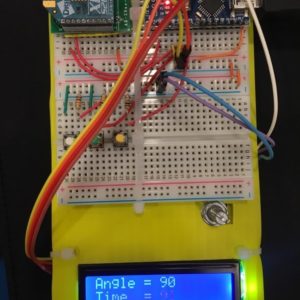
セイル角度が手元で分かる?
本日は人間ドック。ちょっと運動不足だけど問題なし。 時間があまりなかったけど、リモコンにポテンショメータのひねり角度(0~180度)を表示させるようにしてみた。手元を離れるとセイルの角度が視認しにくかったから。ついでに電源ON後の経過時間(…
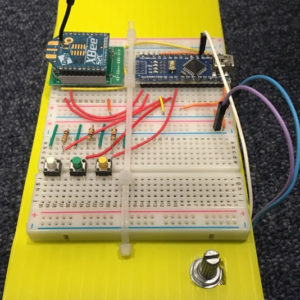
2つのサーボを無線で操作できるようにした
送信機側ポテンショメータの角度の値を、本体側にXBeeを介して無線でシリアル送信するプログラムに3日かかってしまった。調べて見つけ出す能力がまだまだ足りない。 送信機の右下のポテンショメータを回すと、それに連れてセイルを動かすサーボが…
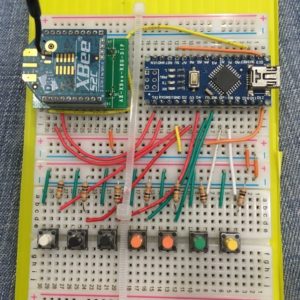
ヨットコントローラのいち例
2つのモーターでセイルを反転させるシリーズを終了するに当たり、コントローラーをいじるので念のため記録用撮影。 毎回うまく動くかな?と期待し、苦労しながら組み立てるので、残念な結果だったとしても愛着が湧きバラしにくい。 次作も悩みながら製作中…
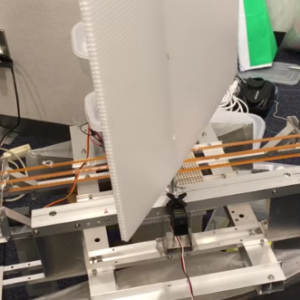
やわらかいハードセイル?
テスト用にダンプラでハードセイルを作ってみた。帆布などたためるセイルに対して固形のセイルだからハードセイル。サーボで直接マストを回転させて角度を調整。風が吹く中で使えるかな。トルクの大きなものを用意しなきゃ、かも。 とりあえず動かして…