テレビで見た風観測衛星ってこれか。地球的な風のモニタリングは大きな課題なんだそうで。 風観測ライダーアラディン搭載アイオロス衛星の打ち上げ…
これで船体が傾いてもマストは立ってられる?手のプルプルが拾われてマストまでプルプルしてる。揺れ周期速度には割りと対応するみたい。動きのスムーズさは改善したい。 [video src="http://okya.info/wp-content…
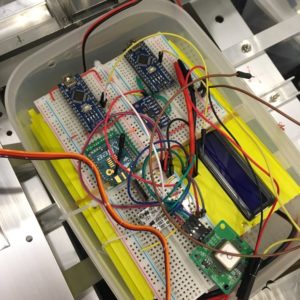
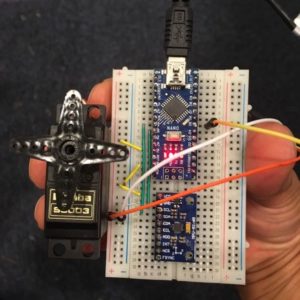
独立の機能だし、ひとつのボードに詰め込まなくてもいい気がしたので分けて搭載してみる。左がリモコン指示を受信してマスト軸周りの回転、ラダーを動かすサーボ2個の操作。右は、揺れる船の傾きを加速度センサで取得し船に対するマストの傾きを変えるサーボ…
マストの傾きを制御するサーボの取り付け位置を変えてみたら、少しは良くなったかしら。倒す角度の計算式を見直して、回路も組み直しましょう。 https://youtu.be/nPUdBKhJQxk…
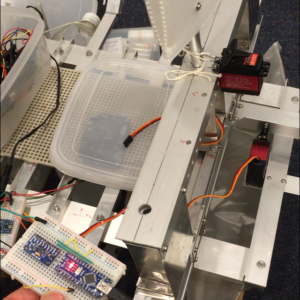
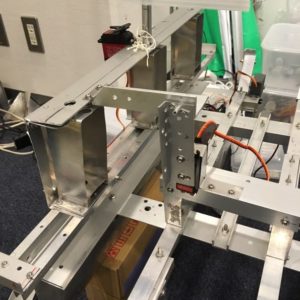
加速度センサーの傾きに合わせてマストを傾けられるようにしてみた。まず、フレームの剛性や取り付け強度の問題で使い物にならない...。 トルクの過不足は後回し。 がっちり作ると重くなるし、バランス悪くなりそう。付け方からして考え直そう。 …
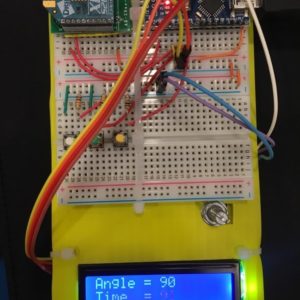
本日は人間ドック。ちょっと運動不足だけど問題なし。 時間があまりなかったけど、リモコンにポテンショメータのひねり角度(0~180度)を表示させるようにしてみた。手元を離れるとセイルの角度が視認しにくかったから。ついでに電源ON後の経過時間(…
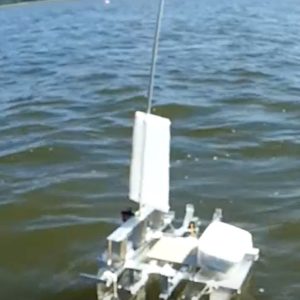
リモコン操作にて。準備したセイルが船体に対して大きすぎて、急遽端材で小さいセイルを準備。 セイルを操作して風向に対して左右に動く。風向は画面左側から。風波が立つと船体が小さいので煽られ、風下に流される。 水面の穏やかな時に、セイルの形状…
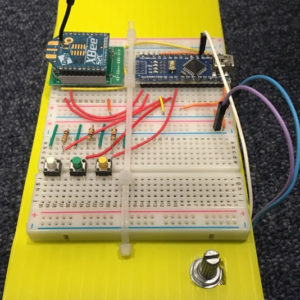
送信機側ポテンショメータの角度の値を、本体側にXBeeを介して無線でシリアル送信するプログラムに3日かかってしまった。調べて見つけ出す能力がまだまだ足りない。 送信機の右下のポテンショメータを回すと、それに連れてセイルを動かすサーボが…

昨日は久し振りの上京。でもなんやかやとハマり気味で目的地に行ってトンボ帰りの面白みのなさ。 うまく転がりますように。 ミッドタウン日比谷。…