10Oct
前回までの流れ
ヨット上での風向風速を取得したいのですが、しっかりした風向風速計は20~30万円相当となかなか効果です。秋月電子などで4~500円ほどで手に入る超音波センサを使って自作しようとしてきました。
超音波距離センサ HC-SR04 http://akizukidenshi.com/catalog/g/gM-11009/
ですが、現在使用しているArduino Megaの特性とヨット自体のサイズ、それと取得しようとしている風速の精度にミスマッチ感があったのです。
Arduino Megaのクロック周波数は16MHz。
この仕様だと検出精度は4usみたい。
風速(340m/secとして)の1m/secを検出するには、
L/340 – L/341 = 4×10^6
になる超音波送受信機の距離Lが必要になる、ということですかね。
計算すると、約46cmになりました。
1msの違いが分かれば!と14cm程度の距離間隔で送受信機をクロスに配置して失敗しておりました。
これが前回まで。
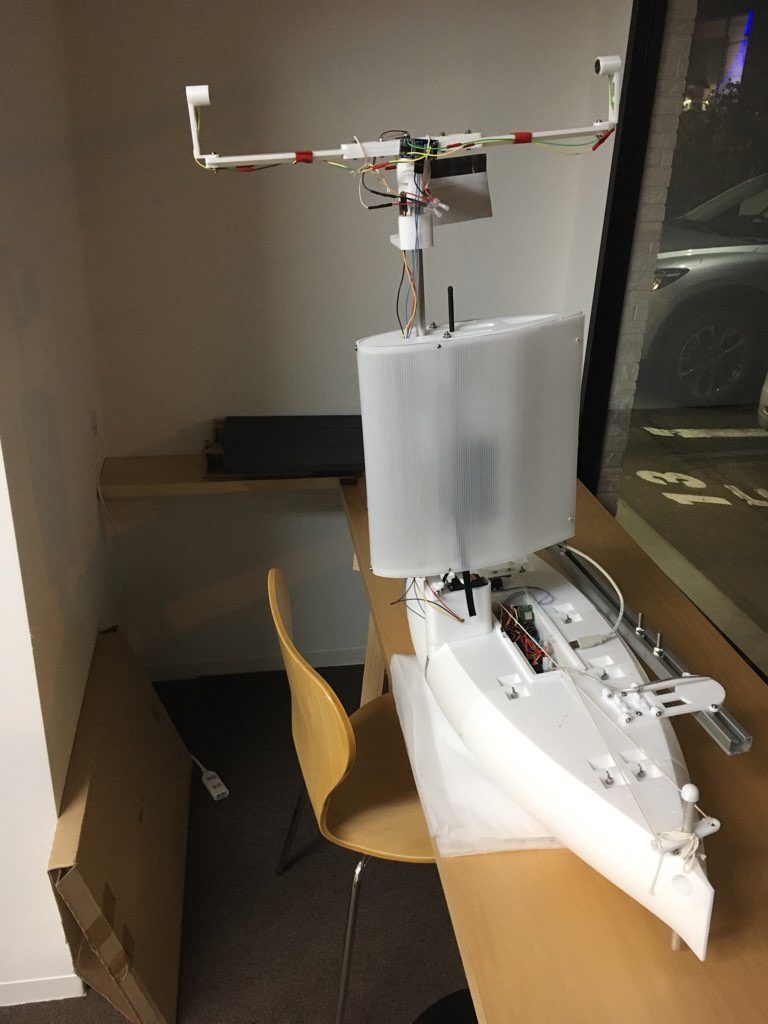
今回の方針
今回は超音波送受信機は1組にしました。架台が大きくなるため、クロスにすると風の抵抗が大きくなります。1組で風軸に向いていれば多少抵抗を抑えられるかな、と。また、この軸の風速しか得られませんが、別途ポテンショメータで風向を得られるようにして組み合わせて乗り切りれるのではないでしょうか。
ひとまずのまとめ
・微風時の風速を測定するため、超音波センサを使って風速計を作りたかった。
・風向も変化するため、同時に風向も得る必要があった。
・現状の試作機のサイズに対して超音波センサの送受信機間の距離が大きいので、構成を考え直した。
・試験結果に風速・風向データも並べられることで、風速とセイル角度との関係を見ていきたい。

株式会社OKYA 代表取締役。いつか日本の海、そして世界の海でシバーリングする浮体式風力発電設備が並んでいるのを見てみたい。そんな夢に向かって微力ながら活動しています。
関連記事
-
1Aug
セイル風上、フィン中央
-
13Mar
arduino モーターとサーボとの組合せ
-

2018.07.30
-

GPS情報をSDカードに記録できるようになった
2018.04.14
コメント
この記事へのトラックバックはありません。


この記事へのコメントはありません。