CATEGORY電子工作

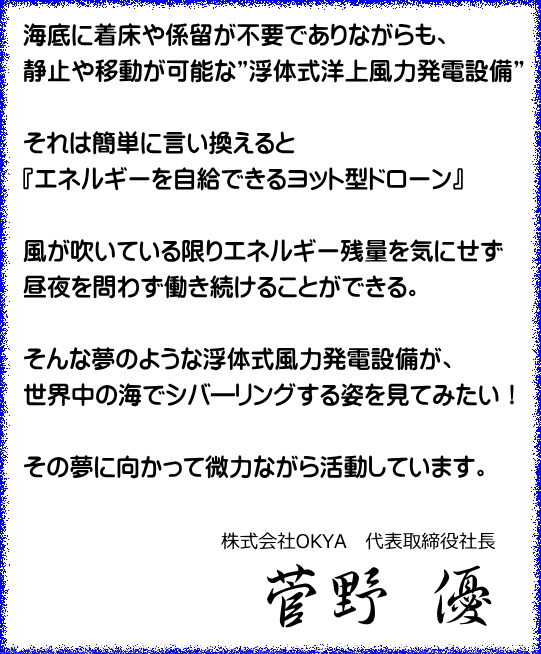
Arduinoで作る自律型ヨット(試作中)#001
初めて沖に出して、SUP上から撮影することができました。ほぼ艇速がでず、ただジッとしているだけの映像ですが…。風速は2m/s程度。 前回からの変更点としては、・船体がセイル側に傾いていたので、バラストを増量してバランスを改善しました…
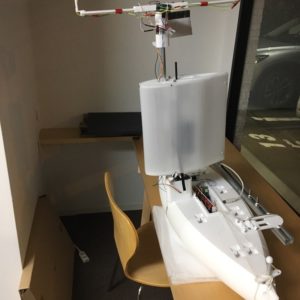
超音波式の風向風速計を作ろう④
前回までの流れ ヨット上での風向風速を取得したいのですが、しっかりした風向風速計は20~30万円相当となかなか効果です。秋月電子などで4~500円ほどで手に入る超音波センサを使って自作しようとしてきました。 超音波距離センサ …
超音波式の風向風速計を作ろう③
よく理解していませんでした。風速の算出には超音波センサのμsが検出できれば風速が算出できそうと考えていたのですが、Arduino(Megaも)はクロック数が16MHzで、有効な最小時間単位は約4μsとのこと。 超音波受発信器の間隔は…

超音波式の風向風速計を作ろう②
超音波センサを持ち上げて干渉しそうなものを排除してみました。架台や目の前のボルトの頭など、影響しているかどうか不明でしたが、以前のセットから発受信機だけ取り外して値を取得するとなんとなく狙った値を出していそうで。 どうやらそ…

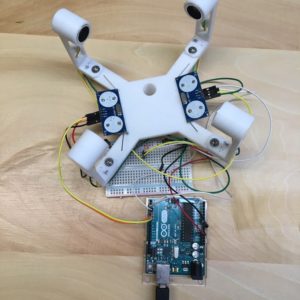
立ち上がらないロボットを作っています
うちの、いわゆるコアファイター的なやつです。全体のコントロールを行います。 なんとかRCカーに使われる7.2Vバッテリーとマイコンボードが収まりました。充電するとき、バッテリー取り出せないかも…。 いつも通りです。 …