CATEGORY1 活動記録
AI/IoT技術研修を受講中
県の産業技術イノベーションセンターでIoT技術者研修を受講中です。足掛け7日間にわたって、AI/IoTを活用したプロトタイプ開発を学びます。 ラズパイでセンサー情報取得や処理をしていきます。Arduino派でしたが、こちらも動い…

OKYA10号機 進水式
ひとまず水に浮かべてみただけです。冒頭で今回使用する風向計が見られます(超簡易的な吹き流し)。ほぼ風がない状態ではマスト重量により風上側に傾斜してしまいます。もう少しウェイトバランスを調整した方がいいかと思いました。 また、持ち手に…

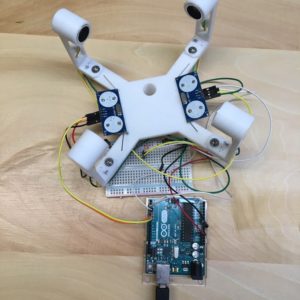
OKYA10号機の動作デモ
セイルとラダーの動作の様子です。Arduinoで動かしています。GPS、コンパス、風向計からのデータを基にセイルやラダーの角度をサーボモータに指示して動かしています。設定は、今後の実地確認で実績を積んで調整していきます。風速の変化によっ…

OKYA10号機!復元力事前確認
OKYAのヨット型ドローンも10号機目になりました。今回は双胴船ではなく単胴船です。水に浮かべる前に復元力を確認してみました。重心のバランスが悪いとひっくり返ってしまいますからね。浮力による支点の移動もあるかと思いますが、大丈夫そうです…

風向計を自作する前の失敗作集
経緯と目的 ヨット型ドローンはセイルに風を受けて移動します。セイルの角度を調整するにはヨットに吹いてくる風の向きの把握が必要です。それなのに期待していた超音波センサを利用した風向風速計の試作が実質困難となりました。 https…
超音波式の風向風速計を作ろう③
よく理解していませんでした。風速の算出には超音波センサのμsが検出できれば風速が算出できそうと考えていたのですが、Arduino(Megaも)はクロック数が16MHzで、有効な最小時間単位は約4μsとのこと。 超音波受発信器の間隔は…

センターボードを船底にねじ止めできるように作るつもりが…
バラストの残りの部分と、センターボードを取り付ける船底部。 センターボードは抜き差しが容易となるようにボルト締め式にしてみた。最初のイメージはネジ穴をスリットにしようといたけど、万一緩んで抜け落ちることがないように穴…

センターボードとバラスト製作中
センターボードとバラストの上側を作ってみました。厚みのない形状も、途中で倒れずに作れました。 バラストはこれから作る下側と組み合わせます。中には砂利なりを入れて重りにします。 手持ちの3Dプリンターは高さが20…

超音波式の風向風速計を作ろう②
超音波センサを持ち上げて干渉しそうなものを排除してみました。架台や目の前のボルトの頭など、影響しているかどうか不明でしたが、以前のセットから発受信機だけ取り外して値を取得するとなんとなく狙った値を出していそうで。 どうやらそ…

立ち上がらないロボットを作っています
うちの、いわゆるコアファイター的なやつです。全体のコントロールを行います。 なんとかRCカーに使われる7.2Vバッテリーとマイコンボードが収まりました。充電するとき、バッテリー取り出せないかも…。 いつも通りです。 …