センターボードよりマストが風上にあるとベアしやすいとすると、マストより(少しでも)風上にもセンターボードを配置すると安定しやすくならないかな? ってことで、こんなカタチにしてみました。 長いから水圧に負けて折れないよう…

初めて沖に出して、SUP上から撮影することができました。ほぼ艇速がでず、ただジッとしているだけの映像ですが…。風速は2m/s程度。 前回からの変更点としては、・船体がセイル側に傾いていたので、バラストを増量してバランスを改善しました…
前回までの流れ ヨット上での風向風速を取得したいのですが、しっかりした風向風速計は20~30万円相当となかなか効果です。秋月電子などで4~500円ほどで手に入る超音波センサを使って自作しようとしてきました。 超音波距離センサ …

自分のことながら、ちょっとずついろいろなものが蓄積されてきています。ヨット型ドローンのプロトタイプやプログラムのことです。そうすると、ちょっと立ち戻ってプログラムを書き戻そうとしても、どこかの掛け違いでうまく動いてくれない迷路にはまってし…
県の産業技術イノベーションセンターでIoT技術者研修を受講中です。足掛け7日間にわたって、AI/IoTを活用したプロトタイプ開発を学びます。 ラズパイでセンサー情報取得や処理をしていきます。Arduino派でしたが、こちらも動い…

ひとまず水に浮かべてみただけです。冒頭で今回使用する風向計が見られます(超簡易的な吹き流し)。ほぼ風がない状態ではマスト重量により風上側に傾斜してしまいます。もう少しウェイトバランスを調整した方がいいかと思いました。 また、持ち手に…

セイルとラダーの動作の様子です。Arduinoで動かしています。GPS、コンパス、風向計からのデータを基にセイルやラダーの角度をサーボモータに指示して動かしています。設定は、今後の実地確認で実績を積んで調整していきます。風速の変化によっ…

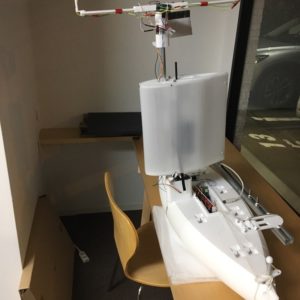
OKYAのヨット型ドローンも10号機目になりました。今回は双胴船ではなく単胴船です。水に浮かべる前に復元力を確認してみました。重心のバランスが悪いとひっくり返ってしまいますからね。浮力による支点の移動もあるかと思いますが、大丈夫そうです…

経緯と目的 ヨット型ドローンはセイルに風を受けて移動します。セイルの角度を調整するにはヨットに吹いてくる風の向きの把握が必要です。それなのに期待していた超音波センサを利用した風向風速計の試作が実質困難となりました。 https…

長男坊の漠然とした責任感? 福島県の楢葉町という海沿いの町で生まれ育ちました。父は主にトラックやダンプカーの運転手をしていました。父の兄弟は男ばかり四兄弟で長男でしたが、実家は出ていました。なので、私が継ぐ家業があるわけでもないので…